Our design for the drone launcher was to have a motor turn spinning gears that in turn spin two wheels in the same direction that will launch our drone. We must make sure this launcher is lightweight to prevent hanging issues and also make sure it is effective at launching our drone.
We started constructing by taking apart some unecessary parts from out previous robots and using them to construct the base. We also got two sticky wheels and some spinning gears along with a motor to start assembly.
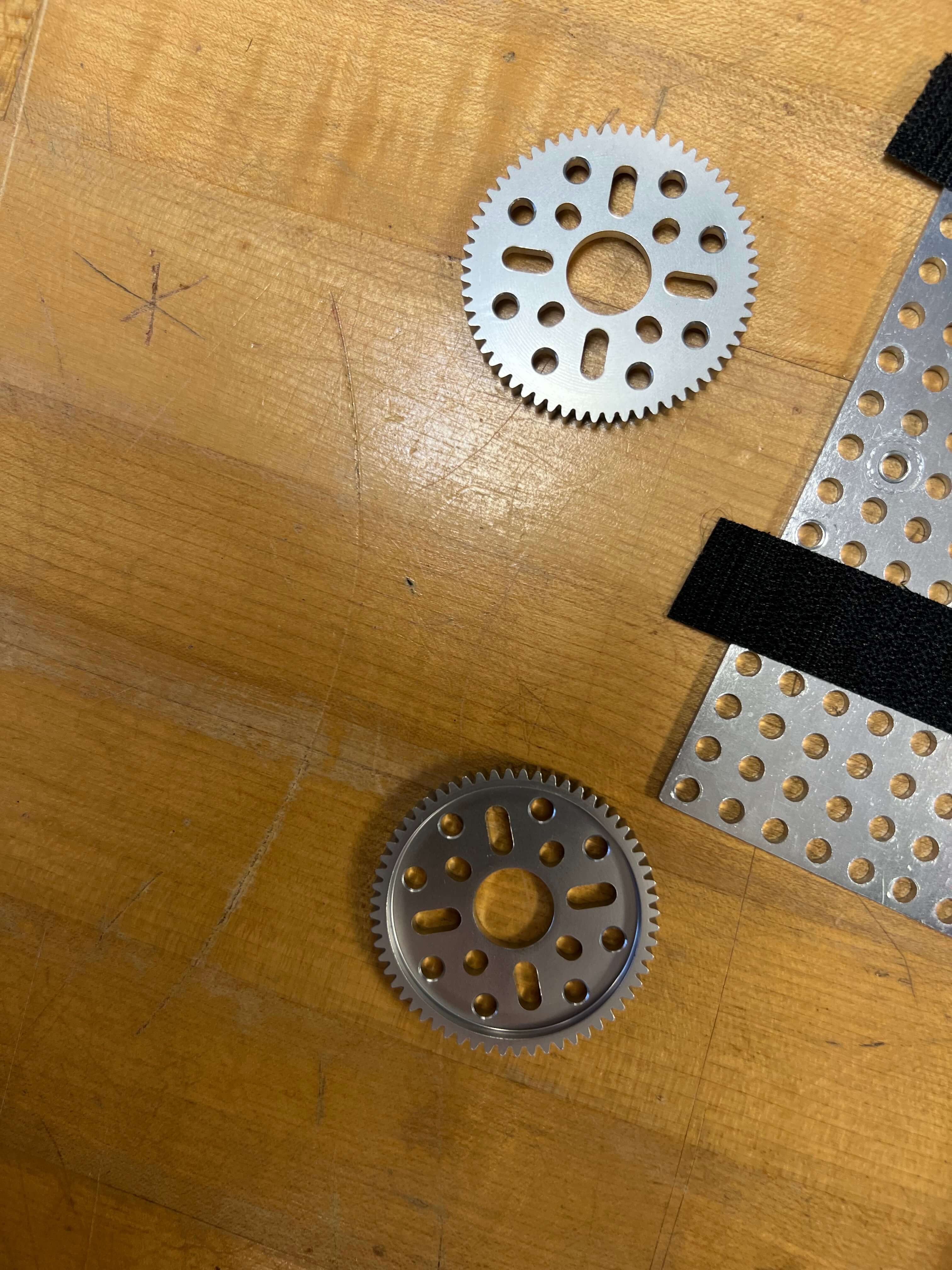
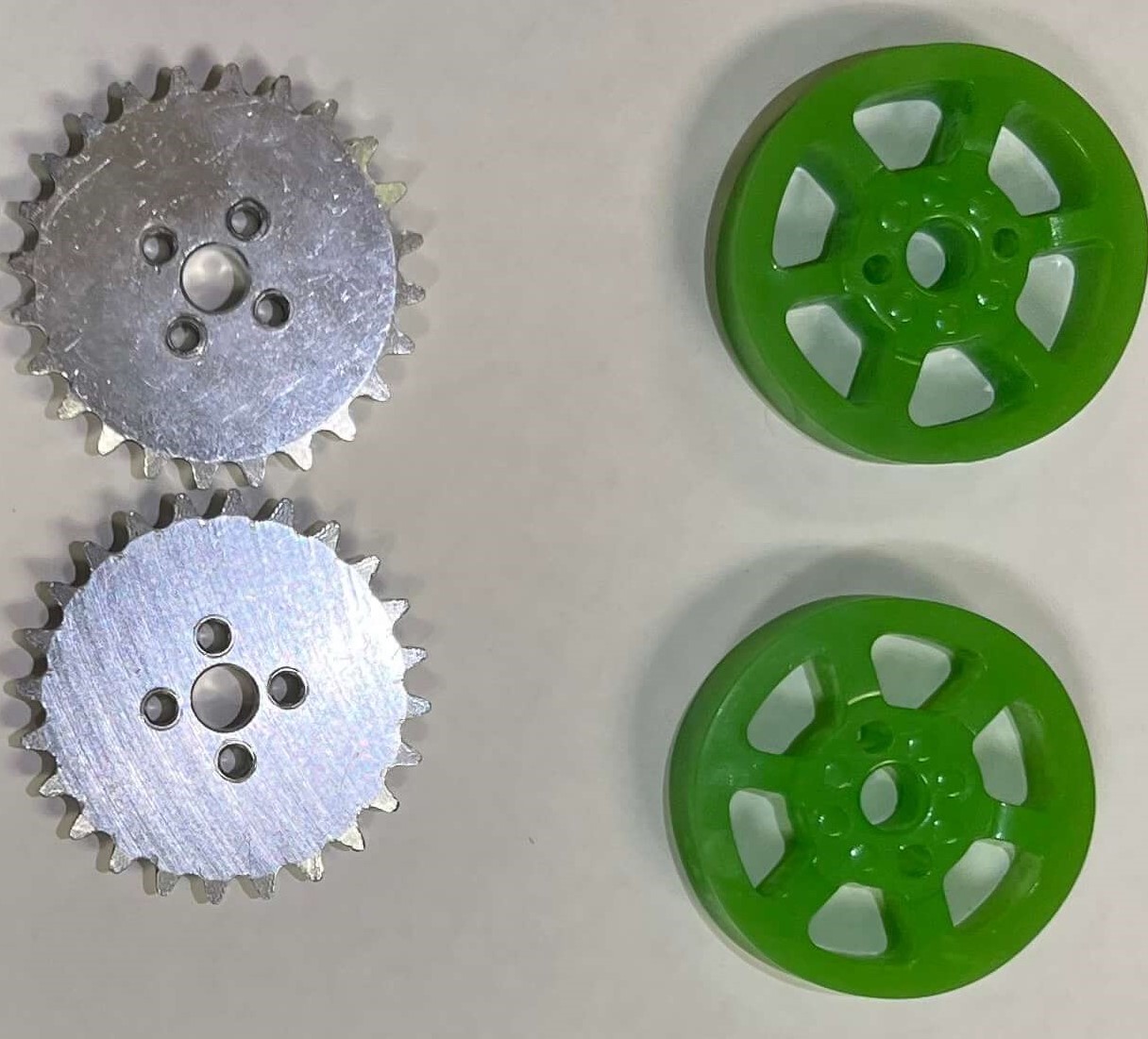
The Spnning Gears
The original spinning gears used for the mechanism.
Secondary Gears
Some secondary gears used for the first prototype.
First Prototype Gears
The types of gears used for the first prototype.
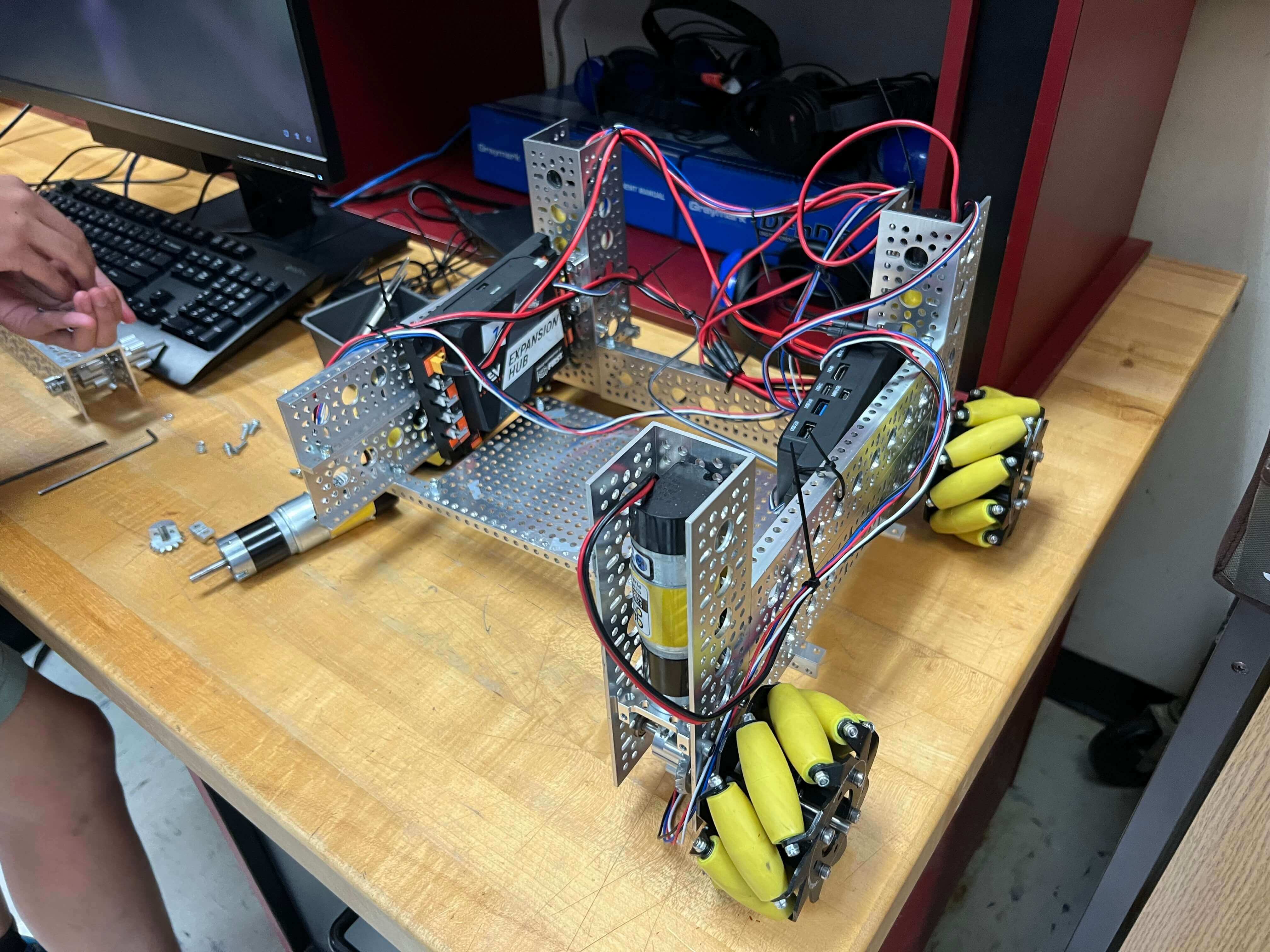
Disassembly
Disassembling the robot from last year.
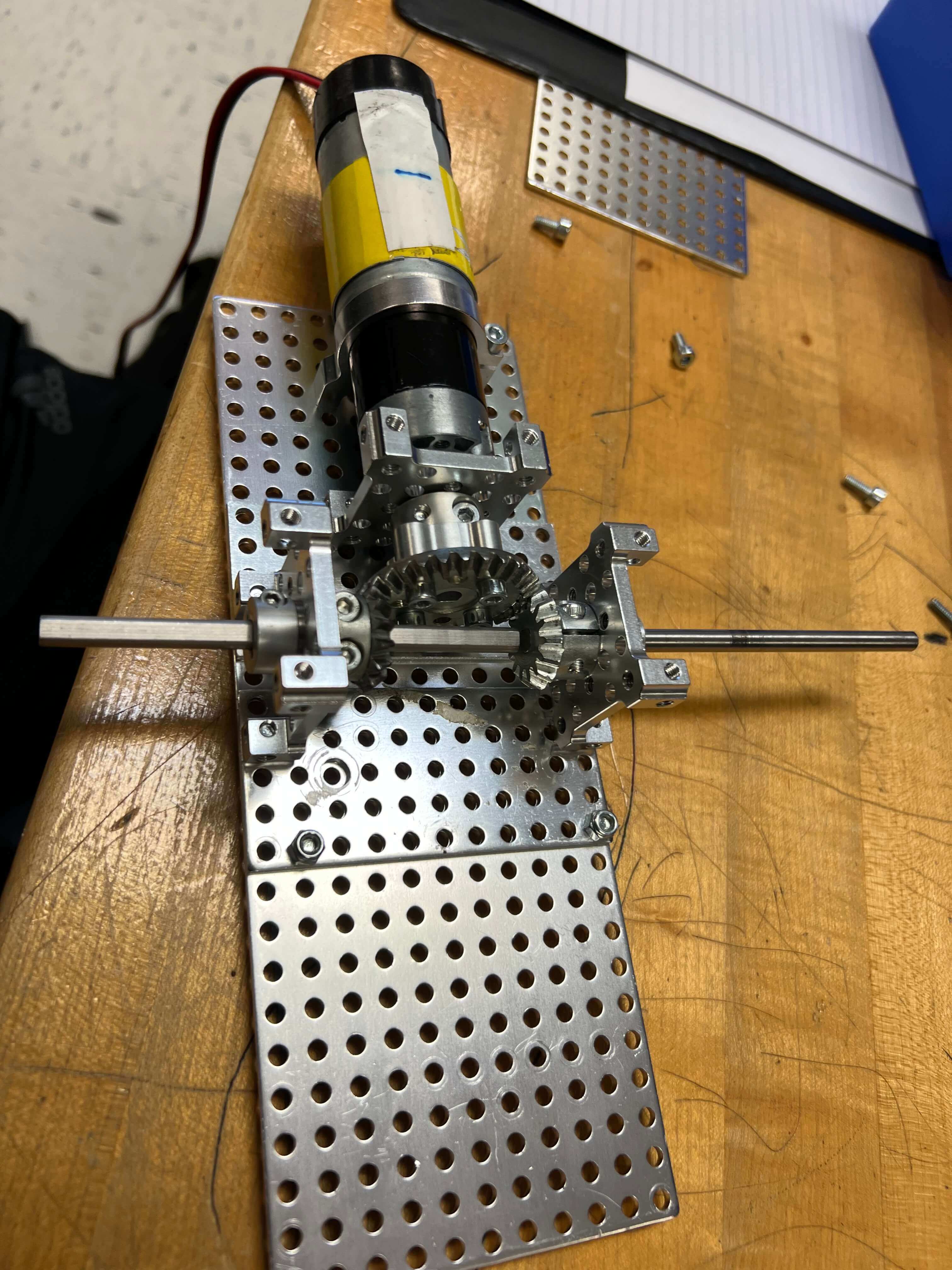
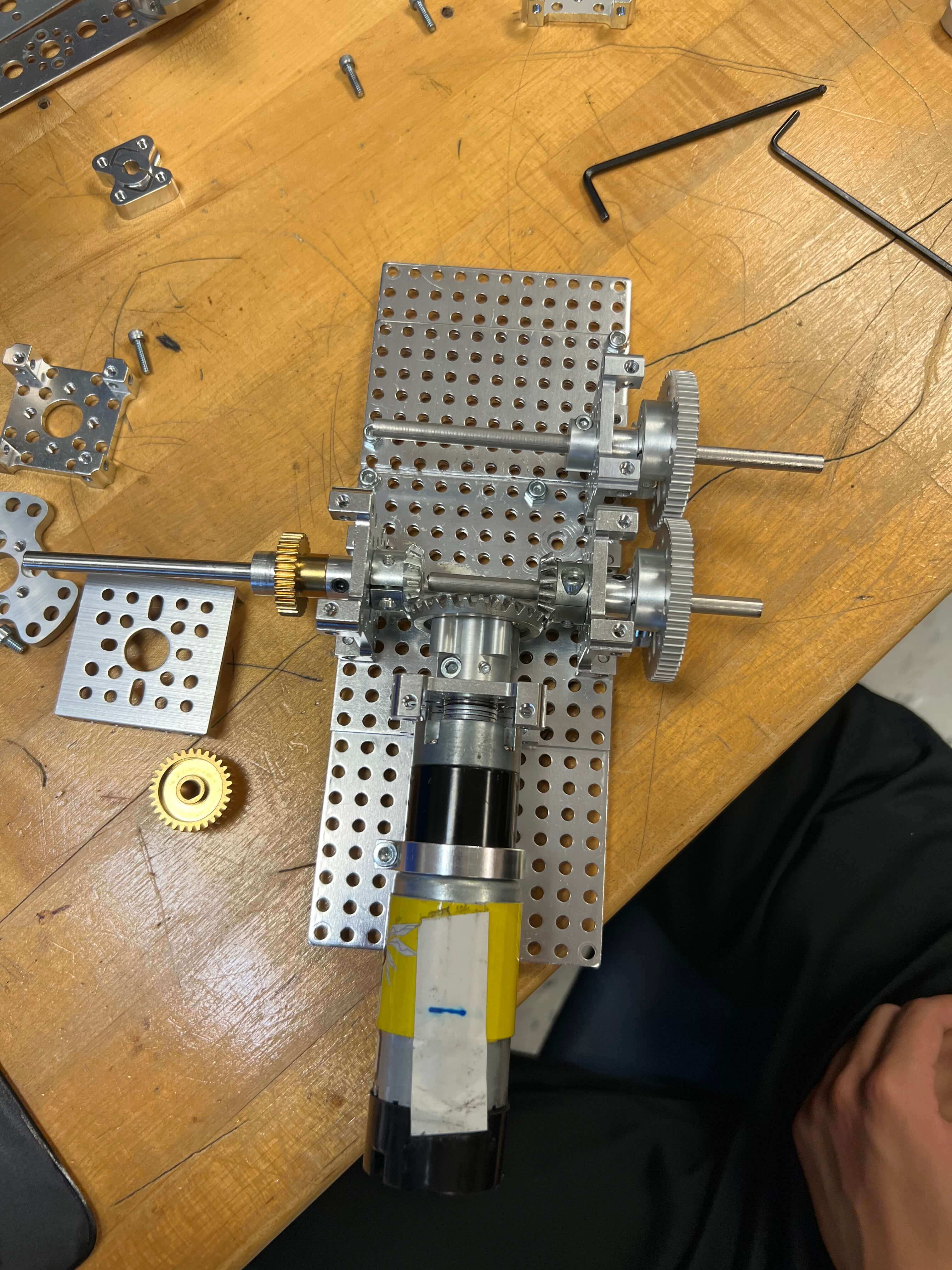
Original Mechanism Base
The original base for the motor.
Constructing The Left Side
Building the left side of the mechanism.
Adding The Spinning Gears
One of the drone launcher builders, Bruno Hohmann, adding the spinning gears to the mechanism.
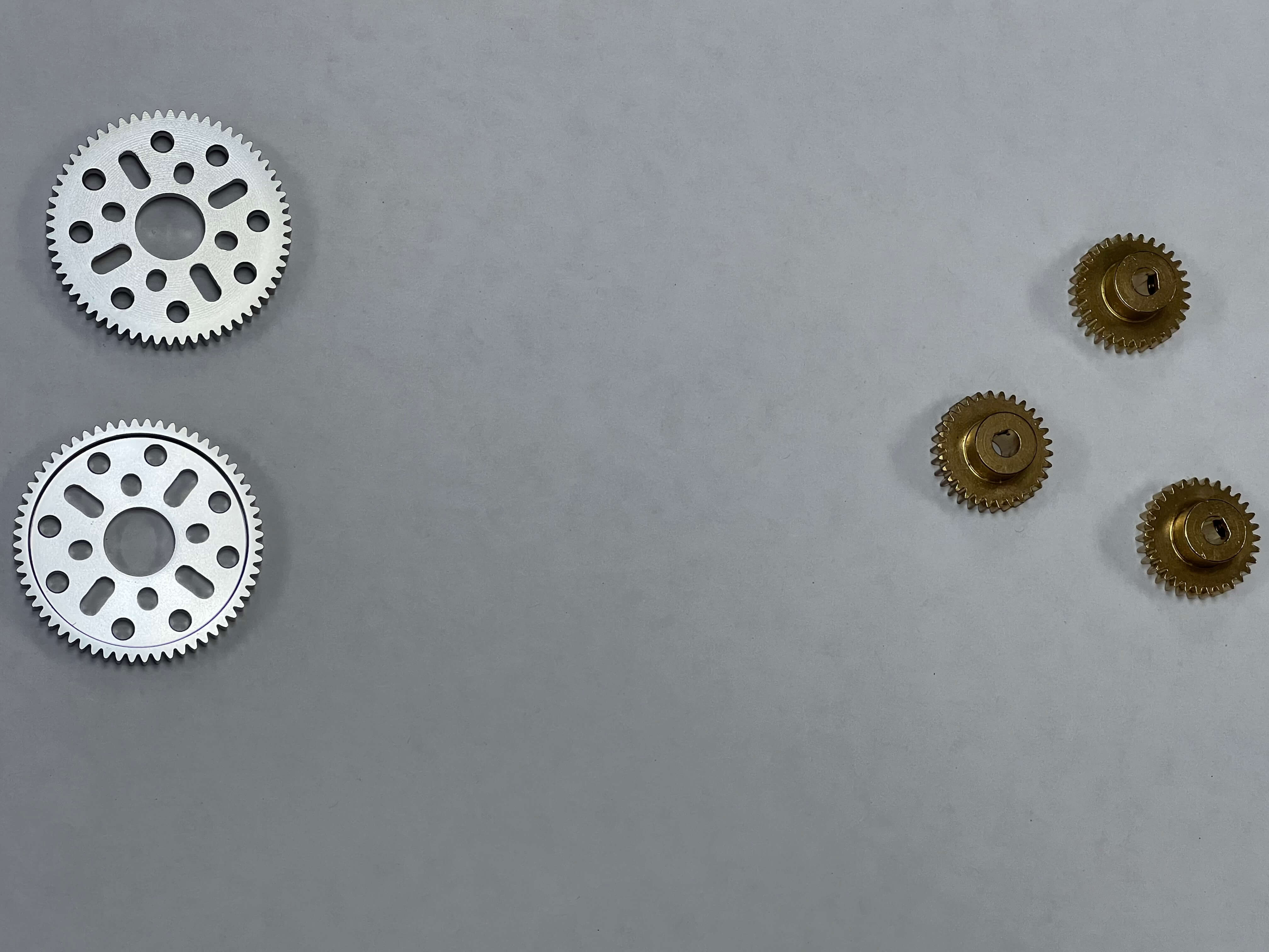
The New Parts
The new parts for the second prototype after realising that the yellow gears were unecessary.
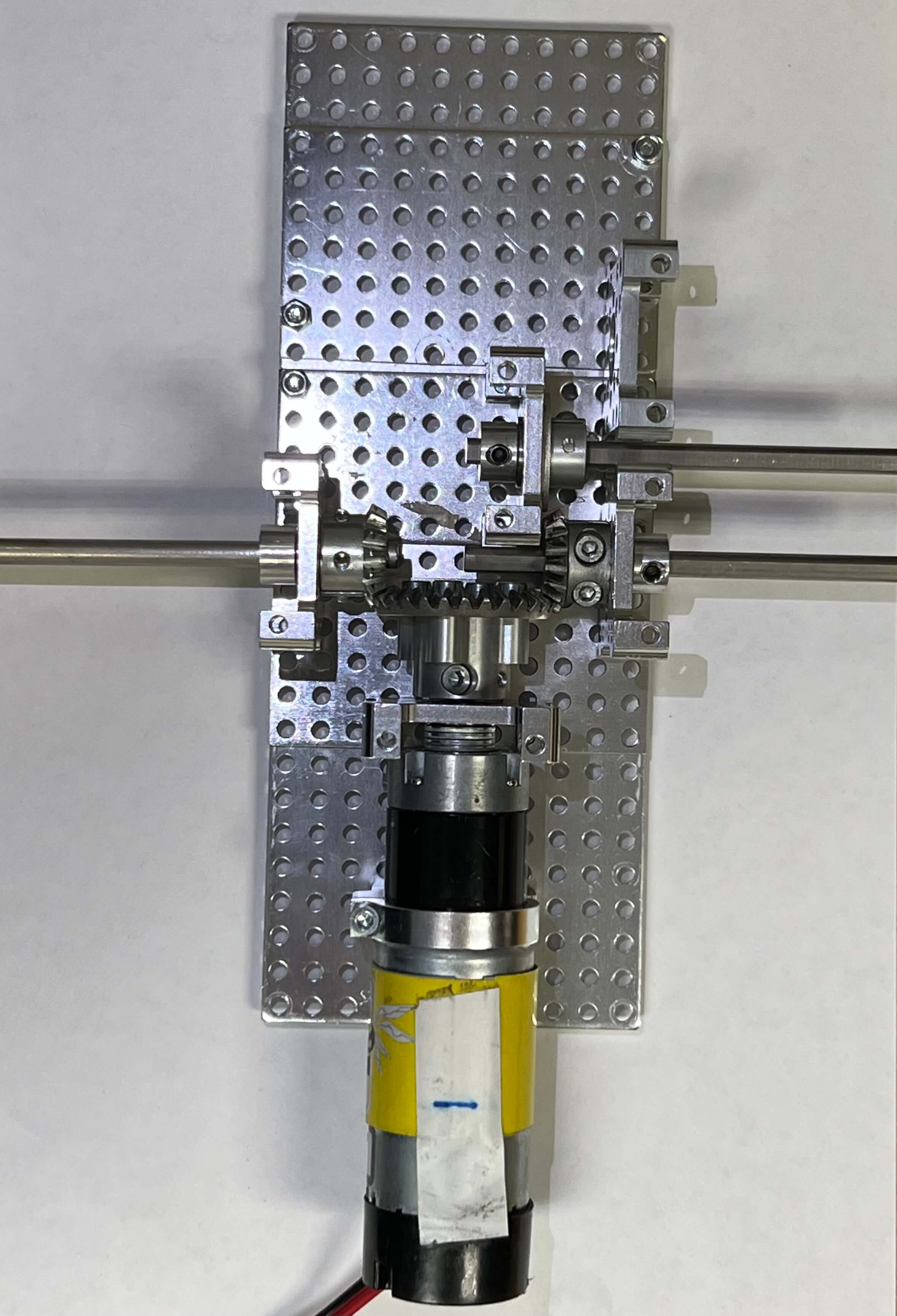
Motor Base For The Mechanism
The base after removing the yellow gears.
Once we collected our parts. We started constructing the base. We attached a motor to a metal plate using screws and small metal parts, and then we started constructing the gear mechanism. We started with the left side of the mechanism and attached rods and gears together. We eventually finished the left side of the mechanism. After constructing the left side, we realized that there was no need to have so much gears, and that we wasted our time. Connecting the flywheels did not need that many gears, and it overcomplicated the design too much, along with excess weight, with an excess amount of gears. We ended up turning to a smaller gear ratio setup, so we went out to find smaller gears. Sadly, we ended up having to scrap our two gear ratio design due to the lack of a gear. We also learned that our drone launcher base had to be modified due to a miscalculation in size. Instead, we decided to make a smaller design using vertical rotators. Eventually, we came across an alignment issue and fixed it by adding more metal plates on the motor base.
Now that our base was set, we had to get our gears to spin in opposite directions; our drone launcher team managed to do this by swapping the gear directions. Now, we started experimenting how we should connect the sticky wheels, which will launch our plane, together without sabotaging our drone launch.
Thankfully, while experimenting, our team found out that our gear spacing was incorrect because of a flaw in the design, so we disassembled the entire launcher and started a new design instead, which prevented a future embaressment in prototype testing. We then reattached the sticky wheels to the mechanism and used a smaller gear ratio, but the design failed; we decided to make the gear ratio larger which helped, but it still did not provide enough velocity to move the drone. Because this design failed, we decided to make another launcher.
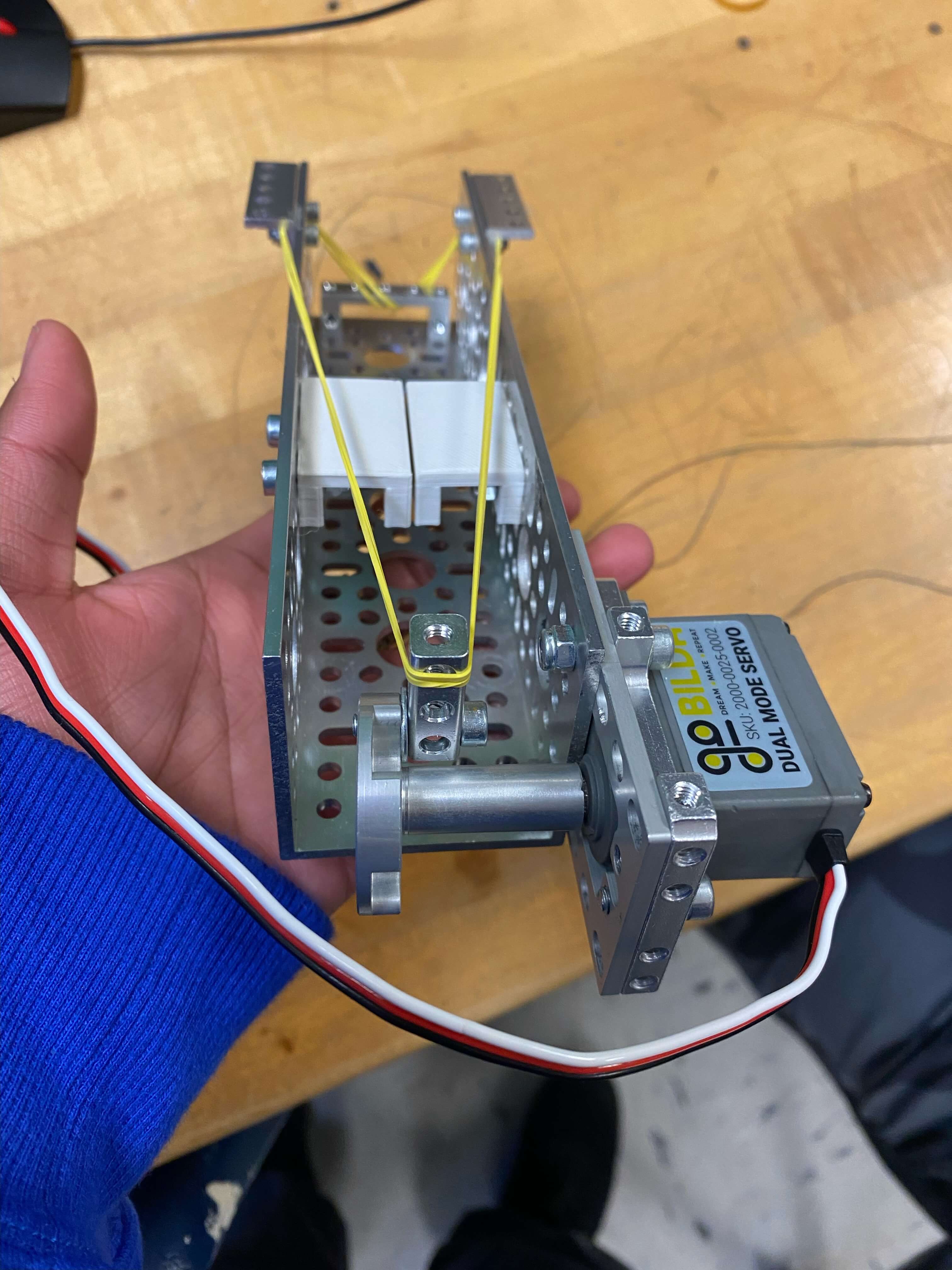
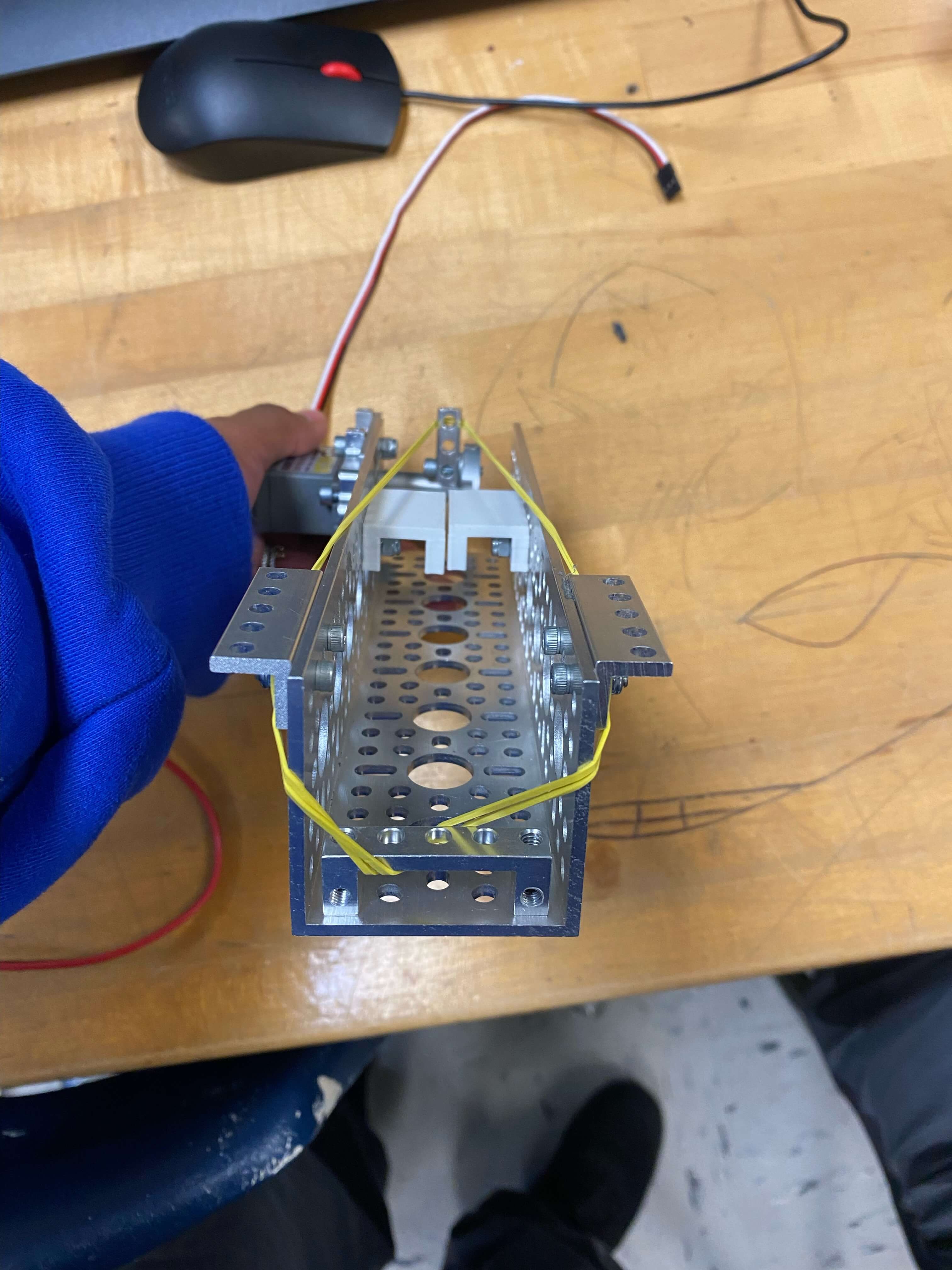
Drone Launcher Version 2
To make the second drone launcher version, we used a servo and some metal pillars. We assembled the pillars together and attached a bob to the servo to act as the launcher. After that, we used a rubber band to be the puller of the drone. Our drone launcher was finished and we assembled it onto the main chassis.